|
Collision models
|
 |
|
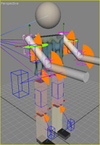
Marilou’s collision model is based on various types of geometries:
- Simple: boxes, spheres, cylinders, capsules, surfaces, rays
- Terrains and elevation grids
- Triangle-mesh (from file or from integrated libraries)
- Convex shapes
One of the properties of simple geometrical shapes is that they are very fast and result in stable and robust simulations. However, it is sometimes necessary to use more complicated shapes, which is why Triangle-Mesh and convex shapes are extremely useful tools.
|
|
Rigid bodies
|
 |
|
Marilou lets you assemble shapes with rigid bodies, which are breakable, but whose form cannot be altered. You can either calculate mass, center, and inertial matrix yourself, or you can let Marilou calculate these parameters automatically by taking the shapes and parameters that constitute the object’s body into account. This flexibility makes it possible for you to adjust parameters and create particularly spectacular effects easily.
Rigid bodies bring together the different geometries that compose a particular dynamic property. These geometries are then subject to gravity, collisions, and other physical aspects in general.
A geometry is considered as "static" if it is not contained within a rigid body. In that case, gravity and shocks with other geometries do not have any incidence on that particular entity.
Statis geometries consume less CPU time and are particularly efficient for modeling large areas and buildings, for example.
|
|
Joints
|
 |
|
Joints are used to assemble two rigid bodies. Static or n-axis, joints express the degree of freedom of movement of one body with respect to another (fixed, 1- or 2-axis hinges, universal, ball & socket, slider...).
Joints integrate parameters that simulate mechanical behavior without having to resort to modling: springs, stops, resistance, etc. For maximum realism, joints are deformable and they may be broken.
|
|
|
|