|
Marilou Open Devices Access (MODA)
|
|
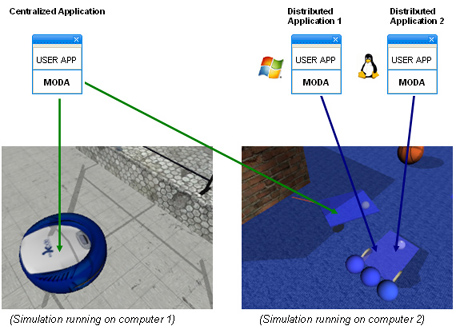
MODA is the SDK used for handling simulated robots and their embedded devices, such as sensors and actuators. Depending on the language you choose, MODA provides libraries (.lib) or Assembly.net (.dll) for accessing simulation over a network. Synchronized to a simulated clock, algorithms can run on any computer in the network.
Individual robots may run several programs. In addition, one MODA program can control several robots, whether or not they be in the same world.
MODA libraries are open-source and compatible Windows / Linux.   |
|
Languages:
C/C++, C++ CLI, C#, J#, VB#
|
|
Compilers:
Microsoft Visual Studio from version 6 to 2010, DevC++, Borland C++ Builder, CodeBlocks and G++ for Linux.
|
 |
|
|
|
Intempora RTMaps |
|
RTMaps users can work on Marilou simulated robots : RTMaps components are able to reach Marilou simulated devices and use values directly. |
|
|
|
Bonavision iRSP |
|
You can program your simulated robots using the powerful iRSP (intelligent Robot Software Platform) from Bonavision. |
|
|
|
Kineo Kite Lab |
|
Kitelab can be used in order to control simulated robots by taking advantage of the Kitelab path planning libraries. |
|
|